
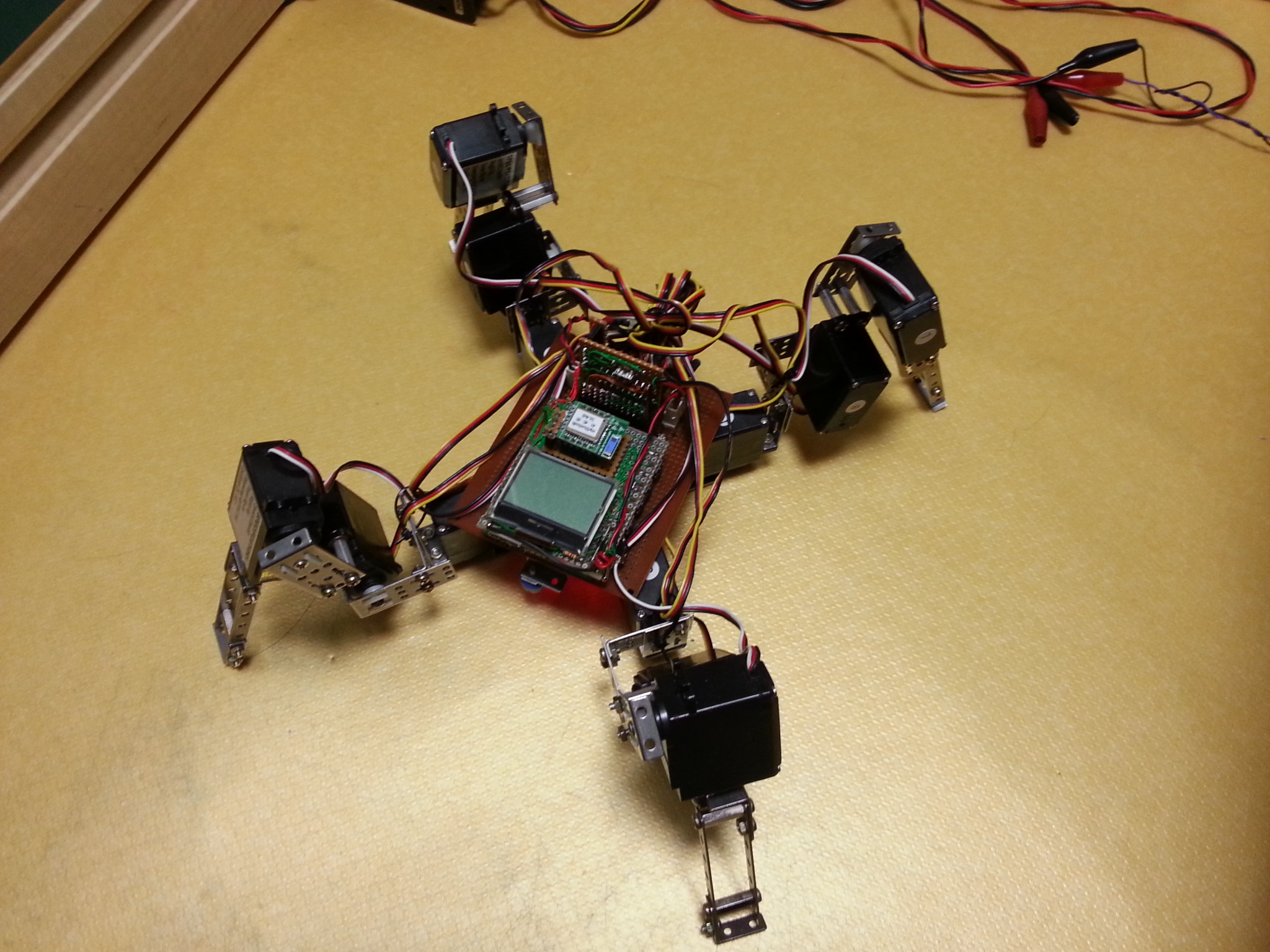
2002년 부터 만들기 시작한 4족 보행 로봇을 11년 만에 1단계 완성 했습니다.
5년. 늦어도 10년 안에 완성하겠지 했었는데,
자금과 시간 부족도 있었지만,
그사이 설계를 몇번이나 새로하고 새로 만들기를 반복하다 보니 늦어졌습니다.
시간은 더 걸렸지만,
늦어진 사이 배터리나 필요한 기술은 더 발달하고 더 축적되어 완성도는 더 높아졌습니다.
보기에 좀 허접해 보이는건
가장 단순한 구조에 가장 돈을 적게 들이고 만들겠다는 초기의 생각을 유지하다보니 보기는 좀 안좋습니다.^^;;;
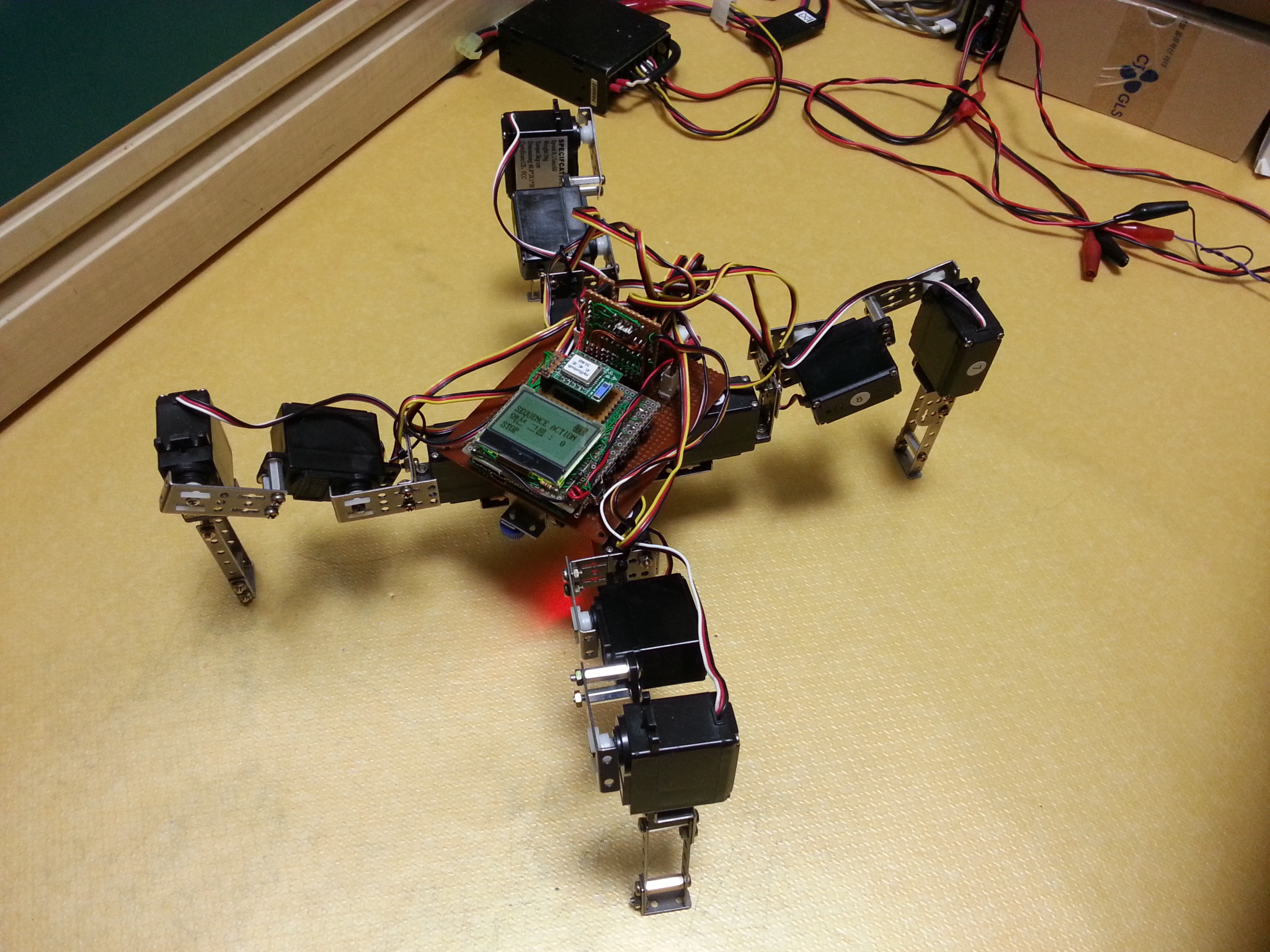
동작이 안정되면 모양을 더 다듬고 외관를 만들어볼 생각 입니다.
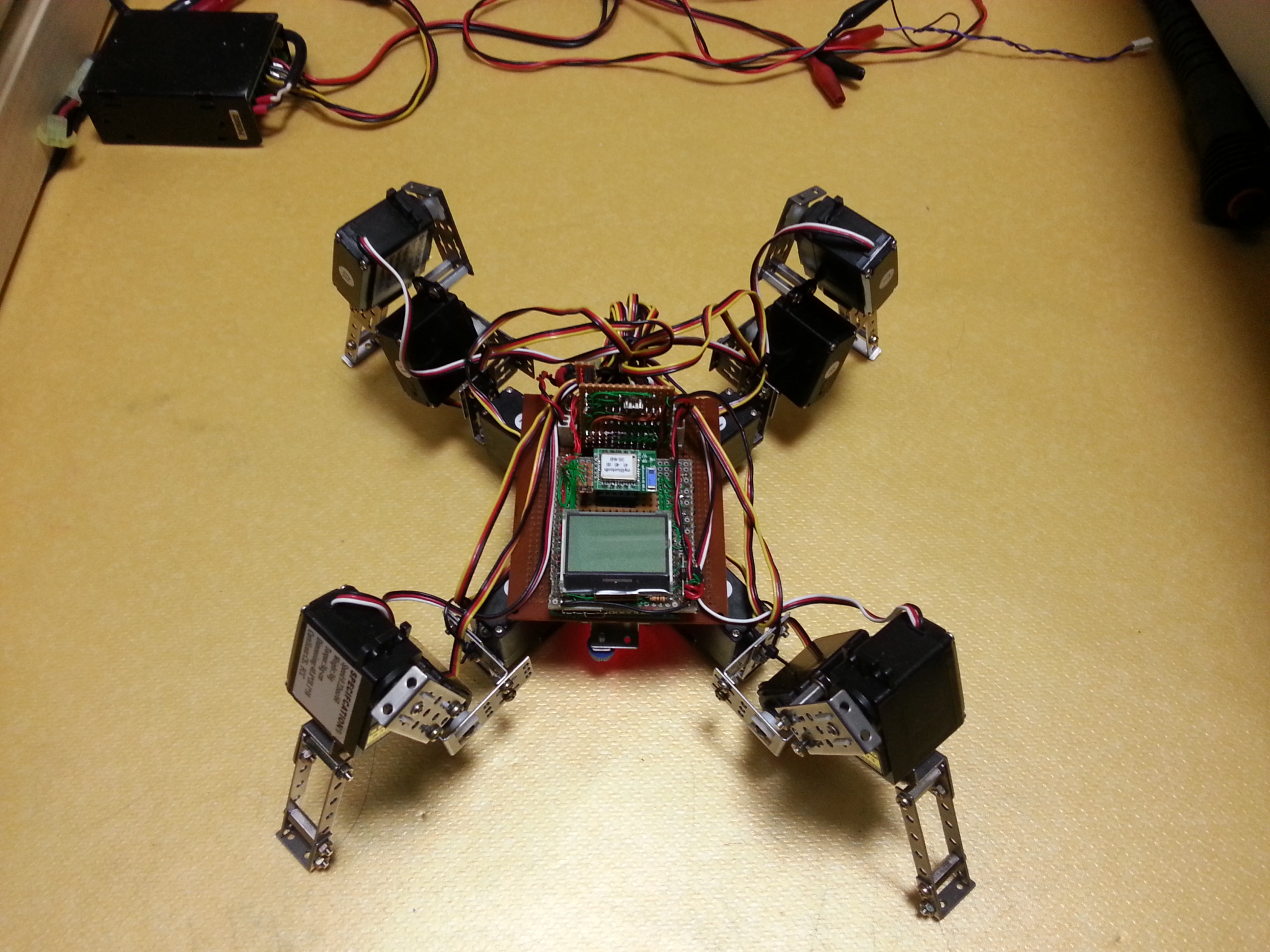
1단계 완성은
파워 소스인 배터리를 내장한 상태로 자립 가동이 가능한 상태까지 이며,
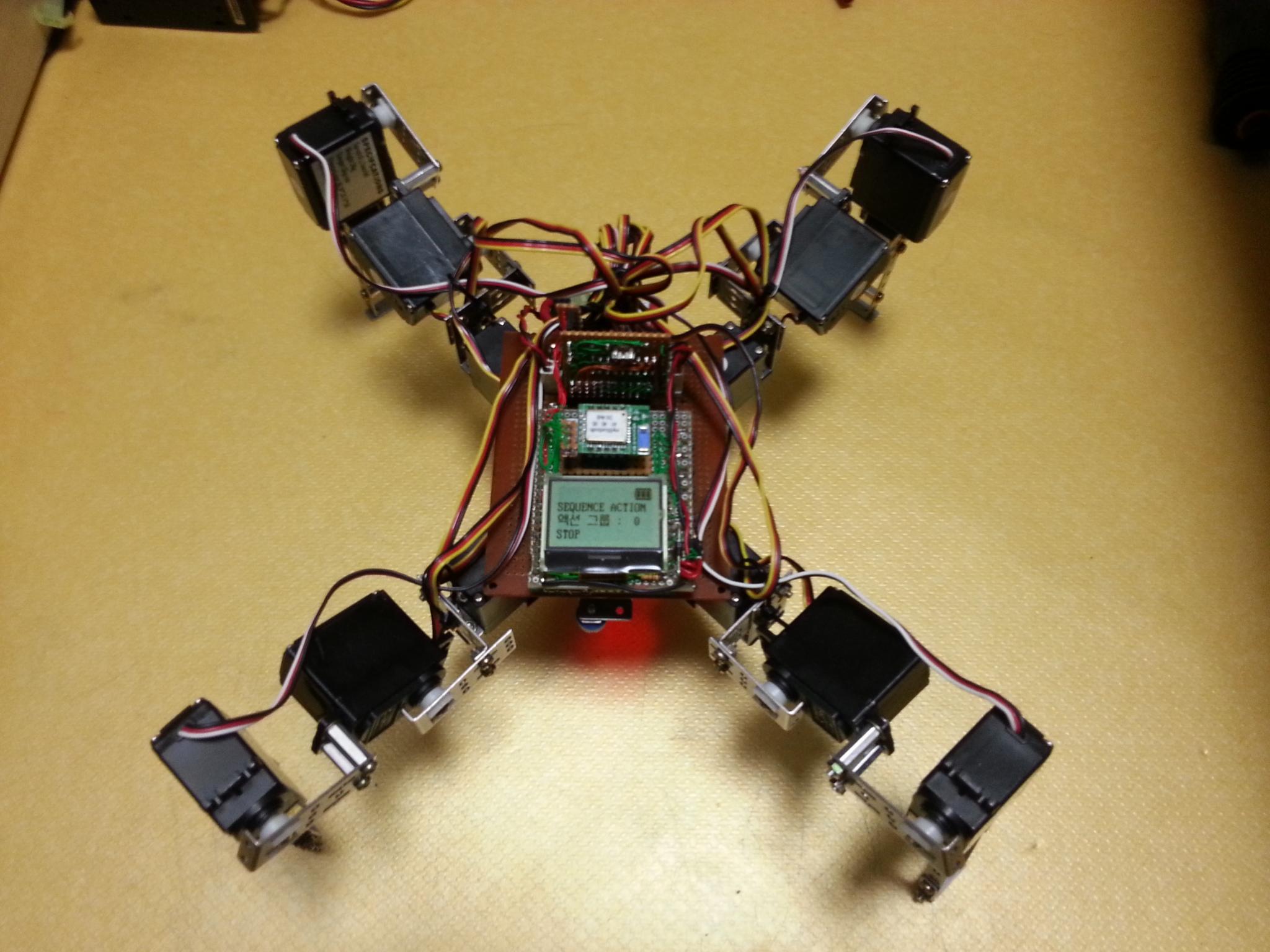
이상태에서 보행 패턴을 완성 시키면 2단계
수학적(?) 보행 알고리즘을 넣어 더 부드럽게 움직이게하면 3단계
센서를 장착하면 4~5단계가 되겠습니다.
쉬운 길도 있겠지만,
어렵더라도 더 저렵하게 내 손으로 하나하나 직접 만들어 움직이게 한다는데 가치를 두고 계속 만들어 가고 있습니다.